
| 電話:13691406546(微信) | ||
| 客服: |

|
|
無人船
無人船開發(fā)系統(tǒng)
SubSea無人船
AutoNaut無人船
|
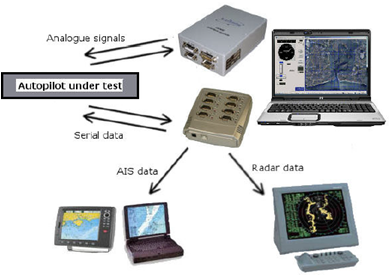
Ship Sim3 無人船開發(fā)系統(tǒng) |
支持船用自動舵IEC62065、ISO 16329和ISO11674國際標(biāo)準測試和認證; 用戶可選擇系統(tǒng)提供的復(fù)合船舶模型,用于開發(fā)仿真任意類型的無人船; 環(huán)境仿真:可仿真風(fēng)、潮汐、波浪以及船舶的淺水效應(yīng) |
可完全配置船只馬達、舵、空氣動力和水動力模型; 雷達、AIS接口可選; 外置3D視圖可選 |

|
Catarob-ATS-03 |
非常便攜; 可單人操作; 遙控和自動控制兩種模式; 自動控制操作時間>4 h |
單波束和多波束測深; 海流剖面測量; 水下建筑三維建模(聲納/激光雷達); 水下目標(biāo)和殘骸搜索 |

|
CAT-Surveyor |
遙控和自動控制兩種模式; 可集成mini-ROV; 自動控制操作時間>12h; 最大速度5節(jié) |
單波束和多波束測深; 水下建筑三維建模(聲納/激光雷達); 水下目標(biāo)和殘骸搜索; 目標(biāo)探測和識別 |
|
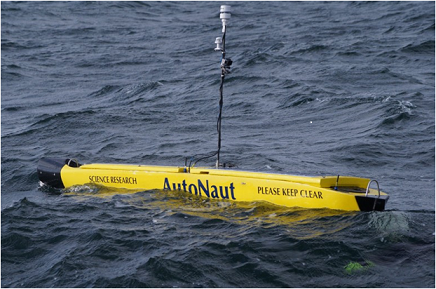
AutoNaut無人船 |
續(xù)航時間長; 使用波浪驅(qū)動,靜水中可使用電驅(qū)動或混合驅(qū)動; 通過衛(wèi)星和無線電進行遠程控制 |
海洋氣象觀察; 被動聲學(xué)監(jiān)測; 海洋環(huán)境監(jiān)測 |