
| 電話:13691406546(微信) | ||
| 客服: |

|
|
水下機器人(ROV/AUV)
AUV
ROV
AUV/ROV 開發系統
ROV模擬培訓系統
水下推進器
水下機械手
ROV/AUV可搭載傳感器

|
水下航行器 YUCO-AUV |
成本低; 重量輕體積小布放簡單; 可搭載 DVL CTD 多參數側掃聲納; |
水下地形測繪; 水下環境的物理監測和調查; 海洋棲息地、珊瑚礁和海草的監測; |

|
水下航行器 LAUV |
工作水深100m; 3節航速下可工作8小時; 可搭載DVL 側掃聲納 CTD 多參數等傳感器; |
水下測量; 海洋測繪; 水下搜索; |

|
水下機器人 DY8T-ROV |
工作水深100米; 高清1080P攝像頭; 岸基供電,可長時間水下作業; |
水下拍攝; 水下作業搜救打撈; 水下取樣探測; |
|
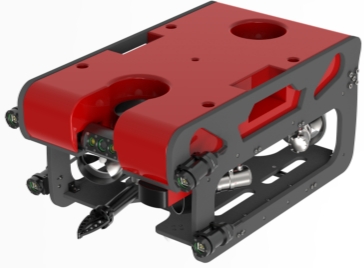
Smart8T Max水下機器人 |
工作水深300米; 800W像素4K分辨率; 配置8個600w功率推進器; |
水下檢測環境調查; 水下拍照錄像搜索打撈; 搭載機械手探測成像聲吶; |

|
水下機器人V8 M500 ROV |
工作水深500米; 具備在任意維度360度旋轉的能力; 穩定性強; |
水下檢測環境; 水下作業; |
|
AUVSim |
AUV/UUV/ROV開發、仿真系統; 真實的六自由度仿真; 環境模型包括潮汐、涌浪; 可以進行實體仿真,具有多種接口; 3D外部視圖、海圖視圖 |
AUV/ROV開發前仿真,確保系統的成功率; 系統開發后進行實體仿真,優化系統配置; 提供豐富的控制硬件板卡; 提供AUV、ROV外部選件 |

|
SPECTRE自動駕駛儀控制板 |
多種控制模式; 支持多種命令、控制接口; 遠程控制功能 |
用于水面船只控制; 水下潛器控制; 空中飛艇控制 |

|
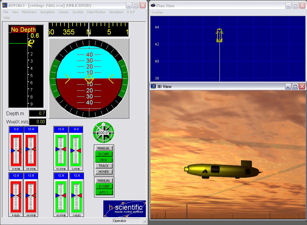
VROV仿真系統 |
支持標準組件和環境影響; 根據任務配置ROV; 齊全的工作任務包 |
用于ROV操作員仿真訓練 |

|
DY水下推進器 |
各種型號和尺寸的的水下推進器; 不同的推力組合; |
AUV ROV可加載; |

|
Tecnadyne水下推進器系列 |
直流無刷推進器; 涵蓋各種型號及尺寸的水下推進器; 不同的推力組合全方位滿足用戶需求 |
ROV推進器; AUV推進器 |
|
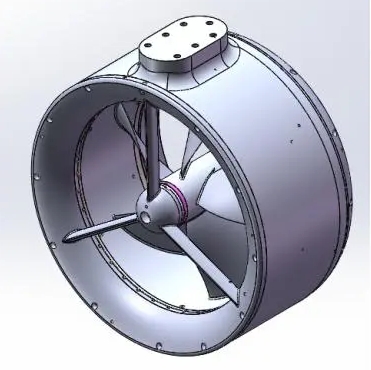
輪緣推進器 |
易維護,維護保養成本低; 防水、耐鹽水; 電機高扭矩、響應快速; 兼容性高; |
適用于AUV、ROV; 設計輕巧、 節約空間; |
|
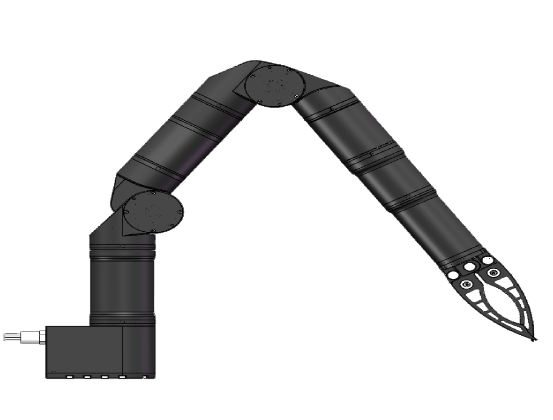
水下電動機械手 | 2-6個自由度; 最大負載2.5kg; | 輕巧方便,適用于水下機器人加載; 主手控制,方便操控; |

|
Cygnus金屬測厚儀系列 |
配套PC軟件; 超聲波測量; 結構緊湊,使用簡單 |
可在空氣中測量或水中測量 |

|
水下激光尺度儀 | 激光測距儀用來提供兩個間距已知的激光參考點,這兩個參考點可以用來評估通過攝像頭看到的目標大小,也可以安裝四個激光單元來更加準確的對目標尺寸進行評估。 | 光波長: 650nm ROV加載; 和攝像頭搭配使用; |